3、为什么选择光纤传感?
光纤传感技术实现物体姿态实时感知有极大可能。FOSs利用光纤传感器(FOSs)实现光纤相对于其起点的方向和位置感知,或通过嵌入式FOSs实现物体的形状感知。FOSS主要设计方案是基于多方位的应变测量。例如,FOSS可以由测量应变的三芯光纤布拉格光栅(FBG)传感器平面组成,用于物体的多维弯曲方向计算,从而在计算机模型中用于重建对象的二维/三维形状(图4)。总的来说,FOSS与传统传感器相比具有许多明显的实际优势,例如:

图4 形状传感器示意图,传感器由三芯FBG阵列构成,用于定向弯曲传感
•FOSS只需一个远程解调仪即可进行监测,无需复杂的布线和连接多个传感器;
•传感器位置无需通电,因此可将传感器放置在其他电子类传感器无法工作的地方测量应变/弯曲;
•较小尺寸的光纤(直径在100μm和2 mm之间)允许将其嵌入非常薄的材料、表面/结构中,或柱中心或小型设备的中心,从而将物体转换为自感应表面;
•光纤传感器不受外部电磁场的影响。
为了突出FOSS的尺寸和简单布置的优势,图5展示了安装在飞机机翼上应变计和FOSS之间的对比。

图5 飞机机翼上21个应变计 vs 628个光纤形状传感器
4、演变趋势
本节回顾了FOS的发展趋势,以开发最新的FOSS。表2按照时间线总结了形状传感的主要论文和专利,以展示光纤传感器从曲率传感器到FOSS的进步。
20世纪80年代左右,曲率传感器的开发考虑过光纤的各种特性,如通过倏逝场的光纤串扰,以及90年代初的定向曲率测量。最终,分布式曲率测量出现在1996年末至2000年初,利用光纤进行形状传感的理论得到了进一步发展。复用技术的发展通过增加“传感点”的数量,推动了对“分布式2D弯曲传感”的更多研究。1996年,光纤光栅波分复用(WDM)用于结构曲率传感和振动模式分析。光缆安装在悬臂梁上,根据光纤中检测到的应变来检测梁的整体弯曲形状。类似地,1996年推出的复用多个FBG传感器的WDM系统,是基于FBG和WDM技术开发的基本FOSS,用于测量应变,从而测量在光纤的多个位置曲率。Chen和Sirkis(2001)提出了分布式曲率传感的总体思路,并于1997年申请了FOSS设备和方法的专利。所提到的系统能够进行曲率和扭转测量,将FBG传感器呈螺旋角度形式粘贴到物体表面,以解析物体的完整3D形状。该技术涉及从波长、时间和空间复用FBG读取数据,并将返回信号分解为曲率和扭曲,从而提供完整的3D形状。
曾经有过一种新型光纤二维弯曲和扭转传感带,商业上称为“ShapeTape”。ShapeTape利用一种称为“Kinotex”的压敏光纤来检测传感带不同区域的压力。1999年,Kinotex最初开发用于检测大型机械臂上的碰撞,该机械臂用于在国际空间站上移动材料。这些压力敏感区域数据可以通过算法确定ShapeTape的弯曲轮廓,并在计算机屏幕上显示3D形状(图6)。最初,希望将其用于三维建模;然而,在最初的兴奋之后,这项技术在实际应用中已基本消失。只有Danisch和Simpsonin(2003)做了一些研究工作,他们使用ShapeTape来监测人类受试者的运动。
2000年后,更多的“形状传感”方法和专利开始出现。尽管ShapeTape的消失和商业化失败,但基本的光纤形状传感在2000年初再次出现,使用多芯光纤,利用FBG的相位和应变变化进行高精度曲率传感。
WDM形状传感的缺点是可以使用的FBG数量有限,限制了对更长或更灵活对象的测量能力。随着计算能力的提高和分布式光纤传感技术的进步,以及光频域反射仪(OFDR)等技术的进步,通过监测毫米分辨率的背向散射,在100米长的单根光纤上数百到数千个FBG或光纤段应变数据的获取,最终形成了分布式高分辨率FOSS。最终,这些早期的高分辨率分布式FOSS实验结果于2007年公布。FOSS为1.1m多芯光纤(MCF),110个FBG传感器间距为1 cm。本文还展示了使用连续FBG和OFDR测量背向瑞利散射成功实现光纤形状传感的视觉凭据。此后,其他各种研究论文和专利推动了分布式光纤形状传感器和技术的发展。下一节将介绍这些传感原理的更多细节和概述。
对FOSS的进一步研究发表在各种科学期刊杂志上,2000年代开始出现了越来越多专利。Jones等人(2006年)于2004年申请了一项专利,提到使用三根光缆的FOSS进行长距离形状传感,每根光缆都带有一系列标定位置的FBG,以监测大型结构(如管道)的3D形状。通过使用四根具有三芯或四芯的光纤,每根光纤都具有多个标定位置的复用FBG,可以确定每个FBG位置处的弯曲方向,随后可以确定管道的总形状。2000年后,形状传感解决方案已广泛应用于各种结构和应用中。自2010年以来,业界最实用、最成功的例子之一就是用在外科手术针头和导管上的FOSS。
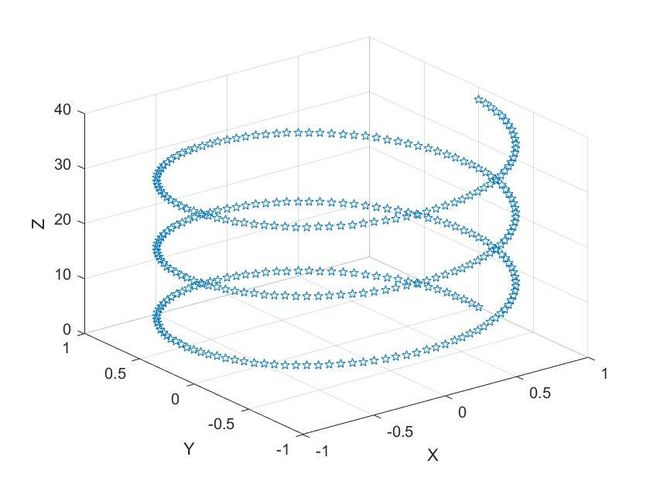
FOSS的重大突破之一是在2008年发明了使用螺旋FBG测量局部曲率和扭转传感技术。FOSS测量光学信号,计算机程序将有用信息用于重构二维/三维形态。Miller et al.(2004)是首批发表了制定和创建拟合算法论文的人之一,将多个应变传感器返回的信号拟合成形状信息。在设计的系统中,只需要知道第一个传感器的位置和方位,剩下的形状就能通过后面其他传感器的数据重构,使用一种被称为“振荡圆”的方法,此方法专门为2D系统开发,被发现适用于2D和3D形状传感。William和Richards(2009)获得了一项专利,详细介绍了通过FBG等应变传感器重建物体三维形状的方法。该专利提出了飞机结构形状传感和控制方面的新方法。
Askins等人(2008年)提出了一种螺旋多芯光纤曲率和扭转传感方法,该方法已成为多芯FOSS的核心。为了更好地理解用于大型结构三维形状传感的表面应变测量,研究继续进行,例如Gherlone et al.(2012)开发了一种基于逆有限元法(iFEM)的模型,用于重建框架结构的三维形状。这些早期系统的图像重建方法都很简单。
NASA的各种研究和开发项目开创FOSS领域,尤其是在航空航天中的应用。Derkevorkian等人(2013年)研究了变形形状传感方法,并开发了一种新方法,用于柔性轻型航空航天结构的实时状态监测和控制。Chan和Parker(2015)获得了另一项专利,该专利用于确定FOSS的3D形状并提高3D形状渲染速度。不断增长的处理能力和可视化能力使这种方法能够在以后的工作中得到应用。
Moree(2015)开发并提出了一种基于Frenet-Serret方程提取纤维三维形状的方法,将光纤建模为Kirchoff弹性杆。FOSS的研究中,更好地利用传感器设备的信息和实时处理数据是最活跃的一个部分。自2013年以来,文献中已报道了大量专利和论文,介绍了如何结合多种测量方法,如扭转、形状和力,去重点关注柔性导向管和铰接机器人臂的应用。
近年来,多芯光纤的布里渊散射频移对曲率的影响的研究进展为FOSS引入了一种新原理,有望实现长距离完整3D形状传感。最新的研究已经在实验上证明了传统布里渊光时域分析(BOTDA)可以用于1 km长的多芯光纤弯曲传感;然而,要将其发展成为FOSS,还需要进一步的工作。此外,多芯光纤技术、组件和连续光栅阵列的制造一直是这一领域研究人员关注的焦点。进一步研发工作以及光纤技术有望在不久的将来进一步推动FOSS的发展。